- Не просто видеть, а осязать: Как мы разрабатываем тактильную обратную связь для революционного VR-обучения
- Зачем нам вообще тактильная обратная связь в VR-обучении?
- От простого к сложному: Виды тактильной обратной связи
- Сердце и душа системы: Компоненты тактильной обратной связи
- Наш подход к разработке: От идеи до реализации
- Преодолевая барьеры: Вызовы в разработке тактильной обратной связи
- Где это применимо: Революционные области VR-обучения
- Конкретные примеры из нашей практики
- Заглядывая в будущее: Перспективы тактильной обратной связи в VR
Не просто видеть, а осязать: Как мы разрабатываем тактильную обратную связь для революционного VR-обучения
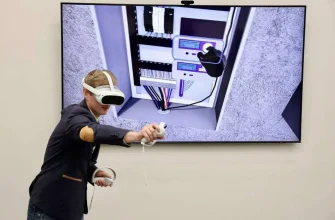
В нашем стремительно развивающемся мире виртуальная реальность (VR) уже давно перестала быть уделом фантастов и геймеров. Сегодня она активно проникает в самые разные сферы, от медицины до промышленного производства, предлагая беспрецедентные возможности для обучения и тренировок. Но давайте будем честны: даже самое реалистичное визуальное и звуковое сопровождение не может полностью погрузить человека в виртуальный мир, если мы не можем его ощутить. Именно здесь на сцену выходит тактильная обратная связь – технология, которая позволяет нам, разработчикам и энтузиастам VR, создавать по-настоящему иммерсивный опыт, стирая границы между цифровым и физическим.
Наш путь в разработке тактильной обратной связи для VR-обучения был полон открытий, вызовов и, конечно же, невероятного удовлетворения от достигнутых результатов. Мы верим, что ключ к максимально эффективному обучению лежит не только в передаче информации, но и в создании условий, где обучающийся может взаимодействовать с виртуальной средой так же естественно, как и с реальной. Способность чувствовать текстуру, ощущать сопротивление инструмента, реагировать на прикосновения – всё это не просто "приятные бонусы", а фундаментальные элементы, которые качественно повышают уровень усвоения материала и закрепления навыков.
В этой статье мы хотим поделиться нашим опытом, рассказать о том, как мы подходим к разработке тактильных решений, с какими трудностями сталкиваемся и какие удивительные возможности открывает эта технология для будущего образования. Присоединяйтесь к нам в этом увлекательном путешествии, где мы вместе исследуем мир, где каждый виртуальный объект можно не только увидеть, но и по-настоящему почувствовать.
Зачем нам вообще тактильная обратная связь в VR-обучении?
Мы часто слышим вопрос: "Разве недостаточно просто видеть и слышать в VR, чтобы учиться?". И наш ответ всегда категоричен: нет, недостаточно, если мы стремимся к максимальной эффективности и реализму. Представьте себе хирурга, который тренируется проводить сложную операцию в VR. Если он не чувствует сопротивления тканей, не ощущает давления скальпеля, не получает обратной связи от инструментов – насколько реалистичной и полезной будет такая тренировка? Или механика, который учится собирать двигатель: без ощущения веса деталей, без тактильного подтверждения того, что винт закручен до упора, его обучение будет неполным и потенциально опасным при переходе к реальной работе.
Тактильная обратная связь заполняет этот критический пробел, перенося обучение из чисто визуальной и аудиальной плоскости в полноценный мультисенсорный опыт. Она позволяет нам моделировать физические свойства объектов и взаимодействий, которые невозможно передать иначе. Это не просто улучшает "погружение"; это фундаментально меняет качество обучения. Когда обучающийся может не только видеть, но и осязать виртуальный мир, его мозг воспринимает информацию гораздо полнее, формируя более прочные и применимые навыки. Мы видим это как мост, соединяющий абстрактные знания с конкретным физическим опытом.
Более того, тактильная обратная связь значительно снижает когнитивную нагрузку. Вместо того чтобы полагаться исключительно на зрение для оценки, например, силы нажатия, мы можем чувствовать эту силу, освобождая часть внимания для других аспектов задачи. Это делает процесс обучения более интуитивным, естественным и менее утомительным. Мы убеждены, что без тактильных ощущений VR-обучение останется лишь красивой, но не полностью функциональной симуляцией, особенно когда речь идет о развитии мелкой моторики, координации и способности к адаптации в динамичных средах.
От простого к сложному: Виды тактильной обратной связи
Когда мы говорим о тактильной обратной связи, многие сразу представляют себе простой вибромоторчик в геймпаде. Это, безусловно, самый распространенный и понятный вид, но мир тактильных ощущений в VR гораздо шире и разнообразнее. Наша команда постоянно экспериментирует с различными технологиями, стремясь создать максимально полный спектр ощущений. Давайте рассмотрим основные виды, с которыми мы работаем:
- Вибротактильная обратная связь (Vibrotactile Feedback): Это самый базовый, но очень эффективный вид. Мы используем миниатюрные вибрационные двигатели (эксцентриковые вращающиеся массы, линейные резонансные приводы), встроенные в контроллеры, перчатки или даже жилеты. Они могут имитировать удары, толчки, текстуры (через высокочастотную вибрацию) или даже сердцебиение. Преимущество – простота интеграции и относительно низкая стоимость. Однако, их возможности ограничены: они не могут передать ощущение веса или сопротивления.
- Силовая обратная связь (Force Feedback): Это уже значительно более сложный уровень, который позволяет нам имитировать ощущение веса, сопротивления, инерции и даже жесткости виртуальных объектов. Мы достигаем этого с помощью различных механических систем: экзоскелетов, рулей с обратной связью, роботизированных манипуляторов. Например, в симуляторах вождения такие системы воссоздают сопротивление руля при повороте или удары при наезде на препятствие. В медицинских симуляторах силовая обратная связь позволяет ощущать сопротивление тканей при разрезании или прокалывании.
- Термальная обратная связь (Thermal Feedback): Для нас это одно из самых интересных направлений. Возможность ощущать тепло или холод в VR добавляет совершенно новый уровень реализма. Мы используем миниатюрные элементы Пельтье, которые могут быстро нагреваться или охлаждаться. Представьте себе тренировку по тушению пожара, где вы не только видите пламя, но и чувствуете его жар, или обучение работе с криогенным оборудованием, где вы ощущаете холод. Это не только улучшает погружение, но и помогает сформировать правильные реакции на температурные воздействия.
- Электротактильная обратная связь (Electrotactile Feedback): Эта технология использует небольшие электрические импульсы для стимуляции нервных окончаний на коже, создавая ощущение прикосновения, давления или даже щекотки. Мы применяем её в случаях, когда нужно имитировать очень тонкие, точечные ощущения без громоздких механических устройств. Она особенно перспективна для имитации текстур или обратной связи от маленьких кнопок и переключателей.
- Пневматическая и Микрофлюидная обратная связь (Pneumatic & Microfluidic Feedback): Эти методы используют воздушные или жидкостные потоки для создания ощущений давления, потока воздуха или воды. Например, мы можем имитировать ощущение ветра, дождя или даже струи воды. Это относительно новое направление для нас, но оно открывает захватывающие перспективы для моделирования погодных условий или работы с жидкостями в VR.
Каждый из этих видов имеет свои преимущества и недостатки, и наша задача – грамотно комбинировать их, чтобы создать наиболее полную и убедительную картину тактильных ощущений, максимально соответствующую задачам конкретного VR-обучения.
Сердце и душа системы: Компоненты тактильной обратной связи
Разработка эффективной системы тактильной обратной связи – это сложный инженерный процесс, который требует глубокого понимания физики, электроники, программирования и психофизиологии человека. Мы подходим к этому комплексно, рассматривая систему как единый организм, где каждый компонент играет свою незаменимую роль. В основе любой нашей разработки лежат четыре ключевых элемента, которые мы тщательно проектируем и интегрируем:
- Актуаторы (Actuators): Это "мышцы" системы, устройства, которые непосредственно создают физическое ощущение. Выбор актуаторов зависит от типа тактильной обратной связи, которую мы хотим реализовать. Для вибротактильной это могут быть эксцентриковые вращающиеся массы (ERM) или линейные резонансные приводы (LRA). Для силовой обратной связи – сервомоторы, шаговые двигатели или специализированные электромеханические приводы. Для термальной – элементы Пельтье, а для электротактильной – электроды. Мы всегда ищем актуаторы, которые обеспечивают высокую частоту отклика, достаточную силу/интенсивность и при этом компактны, энергоэффективны и надежны.
- Датчики (Sensors): Это "органы чувств" нашей системы; Они собирают информацию о взаимодействии пользователя с виртуальной средой или о его движении в реальном мире. Например, датчики положения (энкодеры, IMU) отслеживают движения рук или тела пользователя, тензодатчики измеряют силу нажатия, а датчики давления регистрируют контакт. Точность и скорость работы датчиков критически важны для своевременной и адекватной реакции системы обратной связи. Чем быстрее и точнее мы получаем данные о действиях пользователя, тем реалистичнее будет тактильный отклик.
- Контроллеры и Электроника (Controllers & Electronics): Это "мозг" системы. Микроконтроллеры (например, на базе ARM Cortex) обрабатывают данные от датчиков, принимают команды от VR-приложения и управляют актуаторами. Мы проектируем специализированные печатные платы, которые обеспечивают стабильное питание, точное управление сигналами и минимизацию задержек. Важно обеспечить достаточную вычислительную мощность для обработки сложных алгоритмов тактильного рендеринга и низкую латентность, чтобы ощущения были синхронны с визуальными и звуковыми эффектами.
- Программное обеспечение (Software): Это "душа" системы, которая объединяет все компоненты. Наше ПО включает в себя драйверы для взаимодействия с аппаратной частью, библиотеки для тактильного рендеринга, а также плагины для интеграции с популярными VR-движками, такими как Unity3D и Unreal Engine. Мы разрабатываем алгоритмы, которые преобразуют события в виртуальном мире (например, столкновение объекта, прикосновение к текстуре, изменение температуры) в конкретные управляющие сигналы для актуаторов. Особое внимание мы уделяем оптимизации кода для минимизации задержек и обеспечения плавности ощущений.
Каждый из этих компонентов подбирается и настраивается с учетом специфики задачи. Например, для симулятора хирургических операций мы будем использовать высокоточные силовые актуаторы и датчики давления, тогда как для симулятора пожаротушения акцент будет на термальной и вибротактильной обратной связи. Наша цель – не просто собрать набор устройств, а создать гармонично работающий комплекс, способный максимально точно имитировать реальные ощущения.
| Компонент | Назначение | Примеры устройств | Ключевые характеристики для VR-обучения |
|---|---|---|---|
| Актуаторы | Создание физических ощущений (вибрация, сила, тепло и т.д.) | ERM/LRA моторы, сервомоторы, элементы Пельтье, электроды | Частота отклика, интенсивность, компактность, энергоэффективность |
| Датчики | Сбор информации о взаимодействии пользователя и его движении | IMU (акселерометры, гироскопы), тензодатчики, датчики давления | Точность, скорость, диапазон измерений, надежность |
| Контроллеры и Электроника | Обработка данных, управление актуаторами, связь с VR-приложением | Микроконтроллеры, специализированные платы, драйверы актуаторов | Вычислительная мощность, низкая латентность, стабильность, компактность |
| Программное обеспечение | Интерпретация виртуальных событий в тактильные сигналы, интеграция | Драйверы, API, SDK, плагины для Unity/Unreal, алгоритмы рендеринга | Гибкость, совместимость, эффективность алгоритмов, оптимизация задержек |
Наш подход к разработке: От идеи до реализации
Разработка любой новой системы тактильной обратной связи в нашей команде всегда начинается с глубокого погружения в специфику задачи. Мы не просто создаем технологию ради технологии; мы стремимся решить конкретную проблему в области VR-обучения; Наш процесс можно разделить на несколько ключевых этапов, каждый из которых требует тщательного внимания и итеративного подхода.
Концептуализация и Анализ Требований: На этом этапе мы тесно работаем с заказчиком или экспертами в области, для которой разрабатывается VR-тренажер. Какие навыки нужно развить? Какие физические взаимодействия критически важны? Какие ощущения должны быть смоделированы и с какой точностью? Например, для симулятора сварщика важно чувствовать вибрацию от инструмента и тепло от дуги, а для медика – сопротивление тканей и пульсацию. Мы создаем подробный список тактильных эффектов, их интенсивности и временных характеристик.
Выбор Технологий и Прототипирование: Исходя из требований, мы выбираем наиболее подходящие актуаторы и датчики. Часто это требует тщательного исследования рынка и тестирования различных компонентов. Затем мы создаем грубый прототип – "доказательство концепции". На этом этапе мы не гонимся за эстетикой, а проверяем работоспособность основных принципов: может ли выбранный актуатор создать нужное ощущение, насколько быстро и точно срабатывают датчики. Прототипирование позволяет нам быстро выявить потенциальные проблемы и скорректировать направление разработки.
Разработка Аппаратного Обеспечения (Hardware): После успешного прототипирования мы переходим к проектированию финального аппаратного решения. Это включает разработку печатных плат для контроллеров, выбор микросхем, проектирование корпусов и механических элементов (если речь идет о перчатках, жилетах или экзоскелетах). Мы уделяем особое внимание эргономике, весу, автономности (если требуется) и прочности устройства, ведь оно будет использоваться в активных тренировках. Всегда ставим себя на место пользователя, чтобы убедиться, что устройство не будет мешать, а наоборот, улучшит опыт.
Разработка Программного Обеспечения (Software) и Алгоритмов: Параллельно с "железом" мы пишем код. Это включает низкоуровневые драйверы для взаимодействия с актуаторами и датчиками, а также высокоуровневые API и SDK для интеграции с VR-приложениями. Ключевая часть работы – разработка алгоритмов тактильного рендеринга. Например, алгоритм, который преобразует данные о столкновении двух виртуальных объектов в реалистичную вибрацию или силовое сопротивление. Мы постоянно ищем способы оптимизации, чтобы минимизировать задержку между событием в VR и тактильным откликом, ведь даже небольшая задержка может разрушить иллюзию погружения.
Тестирование и Итерации: Это один из самых важных итеративных этапов. Мы проводим как техническое тестирование (проверка стабильности, надежности, точности работы компонентов), так и пользовательское тестирование. На этом этапе мы собираем обратную связь от целевых пользователей (например, от хирургов, механиков, военных), чтобы понять, насколько реалистичны и эффективны созданные нами ощущения. Мы постоянно вносим коррективы, улучшаем алгоритмы, оптимизируем аппаратную часть, пока не достигнем желаемого уровня погружения и эффективности обучения.
Этот многогранный подход позволяет нам создавать не просто устройства, а комплексные решения, которые органично вписываются в процесс VR-обучения, делая его максимально эффективным и реалистичным. Мы учимся с каждым новым проектом, постоянно расширяя наш арсенал технологий и методик.
Преодолевая барьеры: Вызовы в разработке тактильной обратной связи
Несмотря на огромный потенциал, разработка высококачественной тактильной обратной связи для VR-обучения сопряжена с целым рядом серьезных вызовов. Мы постоянно сталкиваемся с этими проблемами и ищем инновационные пути их решения. Понимание этих барьеров – ключ к созданию по-настоящему прорывных решений.
- Латентность (Latency): Это, пожалуй, самый критический вызов. Любая задержка между действием пользователя в VR и соответствующим тактильным откликом мгновенно разрушает иллюзию погружения. Человеческий мозг очень чувствителен к рассинхронизации сенсорных сигналов. Мы стремимся к латентности в пределах нескольких миллисекунд (идеально менее 10-20 мс), что требует оптимизации на всех уровнях: от высокоскоростных датчиков и актуаторов до эффективных алгоритмов обработки и передачи данных. Это гонка за каждым миллисекундой.
- Реализм и Разнообразие Ощущений: Имитировать сложный мир физических взаимодействий – задача колоссальной сложности. Как передать ощущение шероховатой поверхности, скользкой жидкости, остроты лезвия или мягкости ткани? Ограниченность существующих технологий не всегда позволяет достичь идеального реализма. Мы постоянно исследуем новые материалы, актуаторы и комбинации технологий для расширения палитры доступных ощущений, стремясь к тому, чтобы виртуальное прикосновение было неотличимо от реального.
- Эргономика и Комфорт: Устройства тактильной обратной связи часто представляют собой носимые гаджеты (перчатки, жилеты, экзоскелеты). Они должны быть легкими, удобными, не стеснять движений и не вызывать дискомфорта при длительном использовании. Это особенно важно в обучении, где пользователи могут проводить в VR часы. Мы балансируем между функциональностью и эргономикой, стремясь минимизировать вес, размеры и тепловыделение, а также обеспечить простоту надевания и снятия.
- Стоимость и Доступность: Высокоточные актуаторы, сложные механические системы и специализированная электроника могут быть очень дорогими. Это ограничивает массовое внедрение advanced haptics. Наша задача – находить оптимальные решения, которые обеспечивают необходимый уровень реализма и функциональности при разумной стоимости производства. Мы ищем баланс между инновациями и коммерческой жизнеспособностью, чтобы наши разработки могли быть доступны широкому кругу образовательных учреждений и предприятий.
- Энергопотребление и Автономность: Многие VR-системы стремятся к беспроводному использованию, что делает энергопотребление критическим фактором. Мощные актуаторы могут потреблять много энергии, сокращая время работы от батареи. Мы проектируем наши системы с учетом энергоэффективности, используя умные алгоритмы управления питанием и оптимизируя выбор компонентов. Это позволяет нам создавать устройства, способные работать в течение длительных тренировочных сессий.
- Калибровка и Персонализация: Восприятие тактильных ощущений сильно индивидуально. То, что одному кажется сильной вибрацией, другому может показаться слабым. Нам приходится разрабатывать системы, которые позволяют индивидуально калибровать интенсивность и тип обратной связи, чтобы каждый пользователь мог настроить устройство под свои личные предпочтения и особенности.
Каждый из этих вызовов – это не преграда, а скорее стимул для нашей команды к поиску новых, более элегантных и эффективных решений. Мы верим, что преодоление этих барьеров приведет к созданию VR-обучения, которое будет не только эффективным, но и по-настоящему захватывающим.
Где это применимо: Революционные области VR-обучения
Интеграция тактильной обратной связи в VR-обучение открывает двери в совершенно новые измерения тренировок, где ошибки не имеют реальных последствий, а опыт накапливается экспоненциально. Мы видим, как наши разработки уже сейчас меняют подходы к подготовке специалистов в самых разных отраслях.
- Медицина и Хирургия: Это, пожалуй, одна из самых очевидных и востребованных областей. Хирурги могут оттачивать сложные операции, чувствуя сопротивление тканей, натяжение швов, пульсацию сосудов. Студенты-медики могут практиковать инъекции, катетеризацию, пальпацию, получая реалистичную тактильную обратную связь. Мы разрабатываем системы, которые позволяют имитировать различные патологии и реакции организма, подготавливая будущих врачей к реальным клиническим сценариям без риска для пациентов.
- Промышленность и Производство: От обучения сборке сложных механизмов до работы с высокоточным оборудованием – тактильная VR помогает инженерам и рабочим осваивать новые навыки. Представьте тренировку по пайке микросхем, где вы чувствуете сопротивление припоя, или обучение работе с роботом-манипулятором, где вы ощущаете вес и инерцию перемещаемых объектов. Это снижает количество брака, повышает безопасность и ускоряет адаптацию нового персонала.
- Военное дело и Безопасность: Тренировки по разминированию, обращению с оружием, управлению сложной техникой – все это требует точных тактильных ощущений. Мы создаем симуляторы, где солдаты могут чувствовать отдачу оружия, сопротивление спускового крючка, вибрацию от взрыва или даже тактильные сигналы от своего снаряжения. Это повышает реализм тренировок, улучшает координацию и реакцию в стрессовых ситуациях.
- Авиация и Космическая Отрасль: Пилоты и космонавты тренируются на симуляторах, где тактильная обратная связь критически важна для ощущения управляющих поверхностей, работы двигателей, турбулентности. Мы работаем над системами, которые позволяют точно воспроизводить эти ощущения, подготавливая специалистов к экстремальным условиям полета и работы в невесомости.
- Образование и Наука: Интерактивные уроки по физике, химии, биологии, где студенты могут "прикасаться" к атомам, молекулам, внутренним органам или геологическим структурам. Мы видим большой потенциал в создании образовательных программ, которые делают абстрактные концепции осязаемыми, значительно улучшая понимание и запоминание материала.
- Спорт и Реабилитация: Для спортсменов тактильная обратная связь может помочь в оттачивании техники, например, в гольфе, теннисе или фехтовании, давая мгновенную обратную связь о силе удара или правильности захвата. В реабилитации VR с тактильной обратной связью может ускорить восстановление моторики и чувствительности, предлагая пациентам интерактивные и мотивирующие упражнения.
Это лишь некоторые из областей, где наши разработки уже находят применение. Мы уверены, что по мере развития технологий список будет только расширяться, делая VR-обучение все более доступным, эффективным и, самое главное, ощутимым.
Конкретные примеры из нашей практики
Рассказывая о теории, мы всегда предпочитаем подкреплять её реальными кейсами из нашей практики. Вот несколько примеров проектов, где наша команда успешно интегрировала тактильную обратную связь, демонстрируя её реальную ценность в VR-обучении:
- Симулятор для обучения сборке турбинных двигателей: Для крупного машиностроительного предприятия мы разработали систему, где инженеры-стажеры учатся собирать и разбирать сложный турбинный двигатель в VR. Используя специальные перчатки с силовой обратной связью и вибротактильными актуаторами, пользователи ощущают вес каждой детали, сопротивление при закручивании болтов, щелчок при фиксации элементов. Если деталь установлена неправильно, система дает тактильный "отпор". Это позволило сократить время обучения на 30% и значительно снизить количество ошибок на реальном производстве.
- VR-тренажер для подготовки операторов экскаваторов: Здесь мы столкнулись с задачей имитации ощущений при работе с тяжелой техникой. Наше решение включало полноценное кресло оператора с интегрированной платформой движения, а также контроллеры-джойстики с силовой обратной связью. Пользователь чувствует сопротивление грунта при копании, инерцию ковша, вибрацию двигателя, даже "дрожь" при наезде на камень. Это дало стажерам возможность безопасно и эффективно осваивать управление экскаватором в различных условиях, включая аварийные ситуации.
- Обучающая программа по оказанию первой помощи: Для этой программы мы создали специализированный "манекен" с тактильной обратной связью и VR-очками. Студенты-медики тренируются делать непрямой массаж сердца, искусственное дыхание, накладывать жгуты. Система обеспечивает реалистичное сопротивление грудной клетки при компрессиях, а также тактильную обратную связь, если, например, жгут затянут слишком слабо или слишком сильно. Кроме того, мы добавили термальную обратную связь для имитации температуры тела пациента, что добавило еще один слой реализма.
- Виртуальная лаборатория для химических экспериментов: В этом проекте мы сосредоточились на безопасности и возможности "почувствовать" невидимые процессы. С помощью специальных перчаток с микрофлюидными актуаторами и элементами Пельтье, студенты могут "смешивать" виртуальные реагенты, ощущая изменение температуры колбы, легкое "шипение" при реакции или даже небольшое давление. Это позволяет проводить опасные эксперименты без риска и лучше понимать физико-химические процессы.
Эти примеры демонстрируют, как тактильная обратная связь трансформирует обучение, делая его более практичным, безопасным и запоминающимся. Мы гордимся тем, что наши технологии помогают готовить специалистов нового поколения.
Заглядывая в будущее: Перспективы тактильной обратной связи в VR
Наш путь в разработке тактильной обратной связи для VR-обучения далек от завершения. Мы стоим на пороге новой эры, где виртуальный мир станет неотличим от реального не только визуально, но и тактильно. Мы видим несколько ключевых направлений, которые будут определять развитие этой технологии в ближайшие годы.
- Миниатюризация и Неощутимость: Текущие устройства тактильной обратной связи, хотя и эффективны, часто бывают громоздкими. Будущее за устройствами, которые будут настолько малы и легки, что их присутствие будет практически неощутимо. Это может быть тонкая пленка, интегрированная в одежду, или микроактуаторы, встроенные прямо в кожу (пока это фантастика, но кто знает!). Цель – сделать тактильную обратную связь невидимой, чтобы она не отвлекала от процесса обучения.
- Расширение Спектра Ощущений: Мы будем стремиться к имитации более сложных и нюансированных ощущений. Это включает в себя не только тактильные ощущения, но и проприоцепцию (ощущение положения частей тела в пространстве) и интероцепцию (ощущения от внутренних органов). Представьте себе, что в VR вы сможете чувствовать усталость мышц, напряжение связок или даже легкое головокружение, что может быть критически важно для тренировок в экстремальных условиях.
- Интеграция с Искусственным Интеллектом (ИИ) и Машинным Обучением (МО): ИИ будет играть все более важную роль в создании динамической и адаптивной тактильной обратной связи. Системы смогут анализировать действия пользователя, его физиологические реакции и автоматически подстраивать интенсивность и тип тактильных эффектов для достижения максимального обучающего эффекта. МО позволит создавать более реалистичные модели физического взаимодействия, обучаясь на данных из реального мира.
- Стандартизация и Открытые Платформы: В настоящее время рынок тактильной обратной связи достаточно фрагментирован. Мы ожидаем появления открытых стандартов и платформ, которые позволят разработчикам VR-контента легко интегрировать различные тактильные устройства. Это ускорит инновации и сделает технологию более доступной.
- Мультимодальная Интеграция: Будущее тактильной обратной связи тесно связано с развитием других сенсорных технологий. Мы говорим о бесшовной интеграции тактильной, визуальной, аудиальной, обонятельной и даже вкусовой обратной связи для создания по-настоящему полного сенсорного опыта. Это откроет двери для VR-обучения, которое будет задействовать все человеческие чувства.
Мы верим, что эти направления приведут к созданию VR-систем, которые не просто имитируют реальность, но и позволяют нам переживать её с невиданной ранее глубиной. Наша команда с энтузиазмом смотрит в это будущее, продолжая экспериментировать, изобретать и совершенствовать, чтобы каждый виртуальный опыт был максимально ощутимым и эффективным для обучения.
Наш опыт показывает, что добавление тактильных ощущений в виртуальную реальность преображает процесс обучения из пассивного наблюдения в активное взаимодействие. Оно позволяет формировать не просто теоретические знания, но и прочные практические навыки, которые легко переносятся в реальный мир. От медицины до промышленности, от военного дела до спорта – возможности применения этой технологии безграничны, и мы только начинаем раскрывать их.
Путь к совершенству тактильной обратной связи тернист и полон вызовов, но каждый преодоленный барьер приближает нас к цели – созданию виртуальных миров, где границы между реальным и цифровым стираются на уровне ощущений. Мы продолжим наши исследования и разработки, чтобы каждый, кто погружается в VR-обучение, мог не просто видеть, а по-настоящему чувствовать и осязать этот новый, удивительный мир. Благодарим вас за то, что прошли этот путь вместе с нами!
Вопрос: Почему тактильная обратная связь считается критически важной для эффективности VR-обучения, если визуальное и звуковое погружение уже достаточно развито?
Ответ: Мы считаем, что тактильная обратная связь является критически важной, поскольку она восполняет фундаментальный пробел в мультисенсорном восприятии, который не могут компенсировать только визуальные и звуковые эффекты. Человеческое обучение и взаимодействие с миром по своей природе являются многоканальными. Когда мы, например, учимся закручивать винт, мы не только видим его и слышим звук, но и чувствуем его вес, сопротивление резьбы, момент затяжки. Без этих тактильных ощущений формируемые навыки будут неполными и менее прочными.
Мы видим несколько ключевых причин, почему тактильная обратная связь незаменима для эффективного VR-обучения:
- Повышение Реализма и Погружения: Способность ощущать виртуальные объекты и взаимодействия делает VR-среду более убедительной и "реальной". Это не просто "приятный бонус", а необходимый элемент для полного погружения, который позволяет мозгу обучающегося воспринимать симуляцию как действительность.
- Формирование Точных Моторных Навыков: Многие профессиональные навыки, такие как хирургия, работа с инструментами, сборка механизмов, требуют развития тонкой моторики и чувствительности. Тактильная обратная связь позволяет тренировать эти навыки, давая пользователю ощущение сопротивления, давления, текстуры, что крайне важно для их точного воспроизведения в реальном мире.
- Снижение Когнитивной Нагрузки: Когда человек может полагаться на тактильные ощущения, ему не нужно тратить столько умственных усилий на интерпретацию чисто визуальных или звуковых сигналов для оценки физических взаимодействий. Это освобождает когнитивные ресурсы, позволяя сосредоточиться на более сложных аспектах задачи и ускоряя процесс обучения.
- Улучшение Запоминания и Переноса Навыков: Многоканальная информация лучше запоминается. Когда обучающийся не только видит и слышит, но и чувствует, информация обрабатывается глубже и надежнее. Кроме того, навыки, сформированные с учетом тактильных ощущений, легче переносятся из виртуальной среды в реальную, поскольку они ближе к реальному опыту.
- Безопасность и Возможность Экспериментов: Тактильная обратная связь позволяет безопасно имитировать опасные взаимодействия (например, работу с горячими или острыми предметами, высокое давление), давая обучающемуся ценный опыт без риска. Это расширяет возможности для экспериментов и исследования последствий действий в контролируемой среде.
Таким образом, для нас тактильная обратная связь – это не опция, а необходимость для достижения максимальной эффективности и реализма в VR-обучении, особенно в тех областях, где физическое взаимодействие является ключевым элементом профессиональной деятельности.
Подробнее: LSI Запросы к статье
| VR тренажеры с обратной связью | Технологии хаптики в образовании | Иммерсивное обучение VR | Применение тактильной VR медицина | Разработка VR перчаток |
| Силовая обратная связь VR | Вибротактильные актуаторы VR | Будущее haptic VR | Электротактильная стимуляция VR | VR для промышленных тренировок |